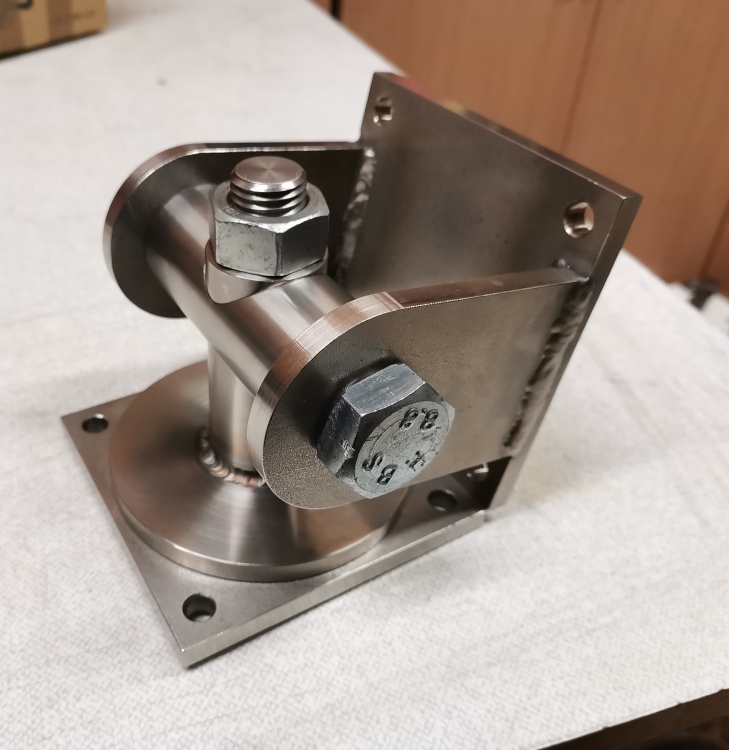
Z minula mám připravenou spodní konstrukci a půl kloubu…
Teď jsem dokončil jsem vlastní kloub mezi „vagónky“. Takhle samostatně vypadá funkční, nenašel jsem tam zatím nějakou chybu v návrhu.
Pospojoval jsem vagónky a konečně si mohl vyzkoušet jak se to celé chová v reálu … ne jen 3D modelová simulace.


No a teď už přišlo na řadu řízení. Kdysi jsem to nějak vymyslel, spočítal, vymodeloval ve 3D a teď se to potká s realitou. Netroufnu si to rovnou udělat z nerezu a přivařit, tak jsem zvolil takovou cestu okolo, že to zkusím napojit nějak ze železa „jen jako“ abych si ověřil, že ten píst to zvládne a rozsahama to bude vyhovovat – bylo to totiž spočítáno na milimetry, aby se to tam všechno vešlo při plných úhlech zatáčení a náklonů. No, a vypadá to, že to vychází … divné :-).

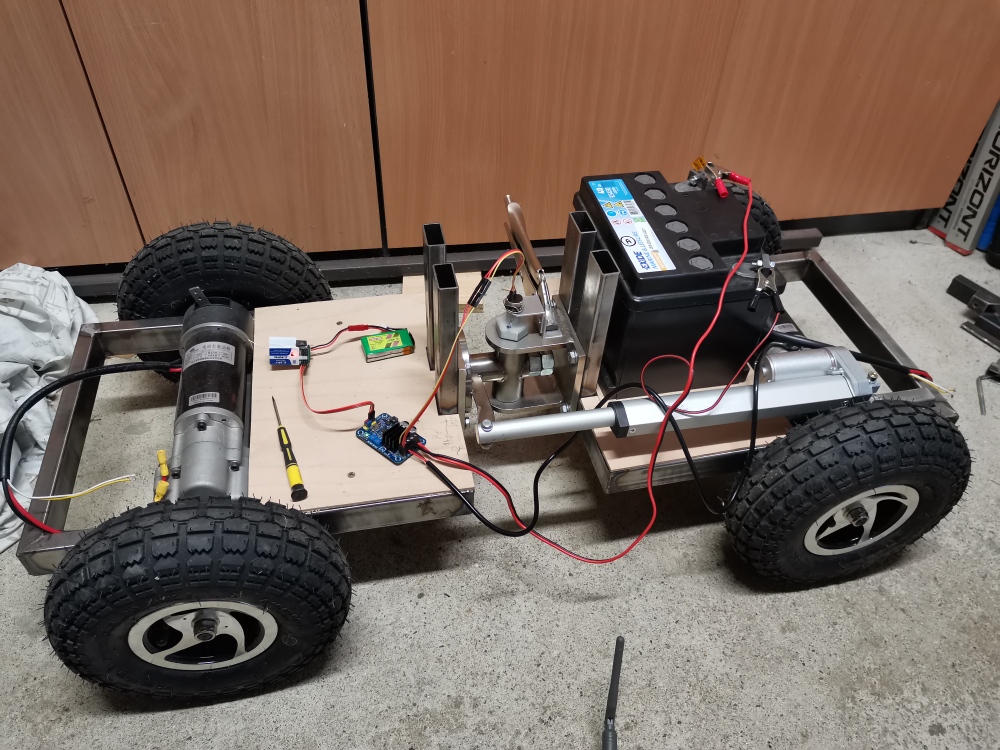
RC komponenty jsem vyhrabal doma, nějaké staré, použité z nějakého z vrtulníků, dokonce se mi povedlo ulomit anténu na přijímači, ale snad to bude fungovat alespoň na 10m i bez ní :-). Je to jen takové základní vybavení, bez možnosti tam cokoliv nastavit vyjma centrování a reverzace, ale na prvotní test, jestli to vůbec jezdí a zvládá terény, to musí stačit.
Tak a teď teda připojit a nastavit elektroniku řízení, to bude taky zajímavé. Než ale bude co zapojovat, musím tam udělat konstrukci na zpětnovazební potenciometr. Budu mít totiž rozdělené „servo“ na dva díly – motor a snímač polohy. Tyhle dvě části jsou normálně přímo v servu a na jedné ose, ale já je rozděluju na píst a potenciometr na kloubu. Bez té zpětné vazby ta elektronika totiž neví v jaké poloze se zatáčení nachází a neví, na jakou stranu má polohu dorovnat v případě nějakého protitlaku. Bohužel podle výpočtu je potřeba potenciometr 10K-100K a v těchto hodnotách mám doma jen dva prastaré kousky, a nevím úplně, v jaké jsou kondici … ale touha to vyzkoušet je silnější.
Zatáčení už je funkční, ale ten poťák trochu blbne … je tam nějaký blbý kontakt a občas vynechává. No snad to alespoň chvilku na první testovací jízdu vydrží. Objednal jsem sice nové, ale ty dorazí až později. No a teď tedy stejný proces akorát na pohony – připojit a vyladit elektroniku, zejména směr dopředu-klid-dozadu, a hranice přechodu, brzdy zatím zapojovat nebudu, podle orientačních výpočtů by to měly úplně v pohodě ubrzdit motory s převodama, i když nebudou dostávat pokyn „zpět“. Ty dřevěné konstrukce jsou samo jen narychlo dočasné, abych měl k čemu přichytit elektro…
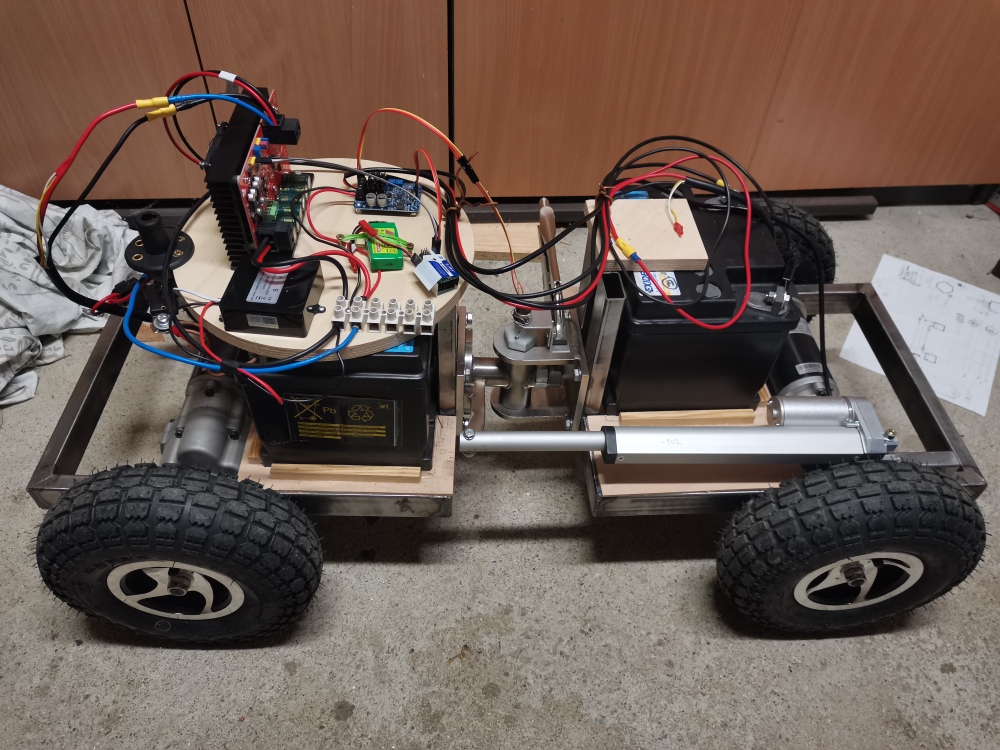
A je to tady – už se to hýbe, a dokonce podle pokynů, co dostává přes vysílačku. Taková radost! Vypadá to, že to jezdí, zvládá to naše terény na zahradě, vyjel jsem s tím až nahoru nad včely i sjel, a opravdu nejsou potřeba brzdy, i z dost prudkého kopečka to kráčí pomalinku a nerozjede to rychle ani když jsou motory „v klidu“ tzn. nemusím to brzdit zpátečkou. Celé to teď váží cca 35kg, nosnost je plánovaná na 100-150kg.
A tady jsou dvě krátká videa pro představu, jak se to pohybuje:
http://upload.martyho.net/AZP_zkouska1.mp4
http://upload.martyho.net/AZP_zkouska2.mp4
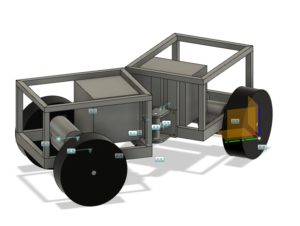
Tedy úkol splněn – vyzkoušel jsem to na různých nerovnostech, na 12cm obrubníkách, různé otáčení, křížení, … pořád to zabírá, všechna kola jsou na zemi (což je důležité kvůli diferenciálům), takže mohu první jízdní test prohlásit za úspěšně splněný… Juchů… 😊. Teď to můžu zase rozebrat, a připravit železné podlahy, abych mohl akumulátory zasadit více dolů a snížit tak těžiště. A taky přidělat pořádně nápravy a dovařit ty vrchní železné „klece“ co jsou vidět na modelu v úvodním článku o AZP.
{kind=link}