Zní to jak z Hvězdných válek, nebo název nového projektu agentur NASA, DARPA či podobných, ale není tomu tak … jen jsem nevěděl, jak jinak to nazvat. Prostě cílem mého snažení je si udělat nějakého pomocníka na zahradu (hodně svažitá) a kolem baráku, případně na jiné prostory, kde to bude dávat smysl. A aby to bylo jednodušší v textu, budu pro jeho označení používat zkratku (AZP=autonomní zahradní pomocník).
Činnosti, co by měl umět udělat
- posekat trávu
- převézt cca 100kg materiálu na korbě, umět vyklopit
- shrabat sníh
- případně naložit něco na tu korbu (vysypat koš ze sekání, pokud budeme sbírat trávu, sníh, …)
Režimy pohybu
- ve známém terénu – podle načtené mapy
- věděl by kde se jezdit může, kde ne
- bude si umět spočítat možnou trasu přejezdu z bodu A do bodu B
- bude umět rozlišit kde se jen jezdí a kde se seká tráva
- v neznámém terénu
- bude umět se vrátit zpět stejnou trasou, kterou byl doveden na dané místo pomocí ručního řízení
- bude umět sám posekat oblast (plochu), kterou před tím objel pomocí ručního řízení
Zdroj energie
Cílem bude mít tohoto pomocníka tichého, tedy na elektřinu. Jelikož bude vhodné ho občas používat delší dobu (hodiny) nebo v neznámém terénu bez možnosti dobíjení, a trakční baterie velké kapacity by způsobily příliš velkou hmotnost vlastního vozidla, rozhodl jsem se, že budu vozidlo připravovat na 1h nepřetržité práce (plný výkon) nebo 2h (částečný výkon). Co bude nad rámec těchto požadavků bude pokryto dobitím baterií v mezičase, nebo dočasným osazením benzínového motoru opatřeného alternátorem a výkonu, který odpovídá odběru při plném zatížení.
Fáze projektu
Je jasné, že tohle je běh na delší trať – že nebude vše hotové hned, že nebude vše fungovat napoprvé nejlépe. Aby se to dalo nějak uchopit, rozhodl jsem se rozdělit tohle snažení do několika fází.
Fáze 1. ověření výpočtů
V této fázi byly stanoveny základní technické parametry, zvolil jsem konstrukci náprav, kola a sestrojil jsem jednoduchou konstrukci k jejich ověření v reálném světě. Tato konstrukce bude po této fázi rozebrána – do další fáze se použijí pouze nápravy jako takové, akumulátory a balancer, samozřejmě jen pokud se osvědčí. 🙂

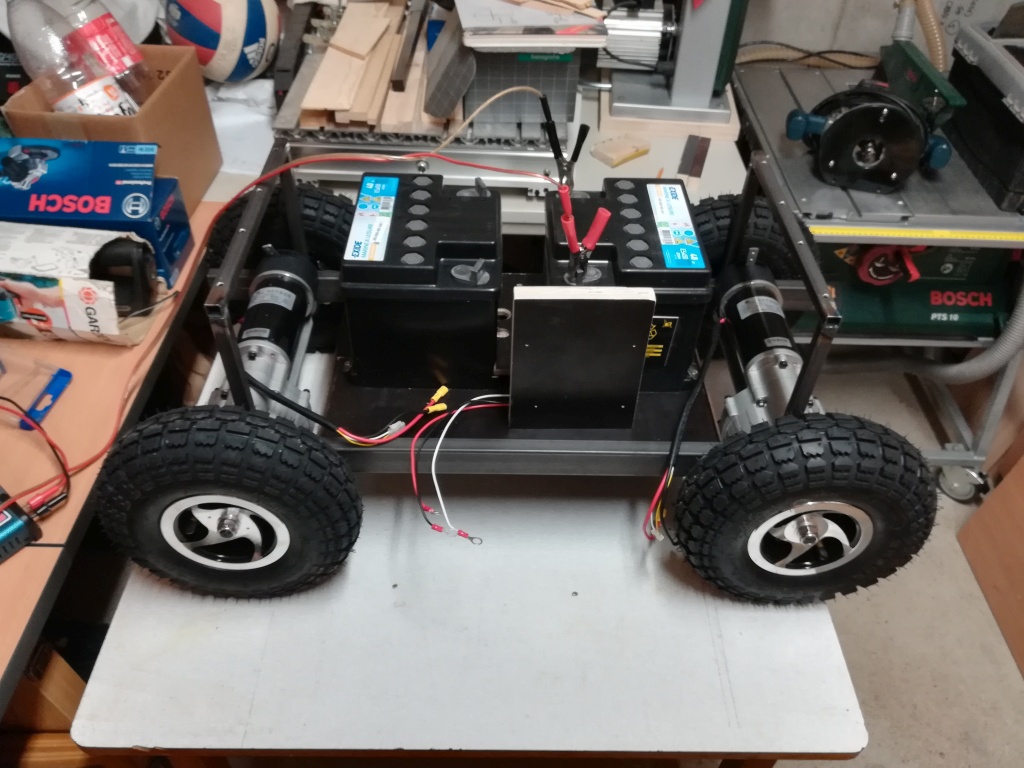

První testy dopadly dobře – potvrdila se očekávání. S hmotností vlastního vozidla cca 60kg a užitečná zátěží 80kg je schopno jet po rovině rychlostí cca 10km/h, do prudkého kopce je schopno (s výrazně nižší) rychlostí vyvézt užitečnou zátěž 140kg včetně opakovaného zastavení a rozjezdu uprostřed svahu.
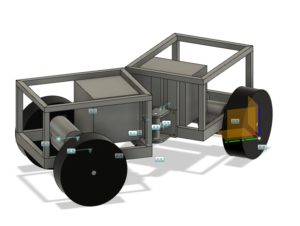
Fáze 2. projektování skutečného vozidla
Dalším krokem bude vymyšlení skutečného vozítka, jeho vyprojektování v teoretické rovině, navržení rozměrů a konstrukčních prvků. Taky by bylo dobré základními výpočty ověřit materiály a použité profily, aby odpovídaly očekávanému zatížení, případně provést simulaci v CADu.
Ahoj, tenhle projekt vypadá velmi dobře, jsem zvědav, jak to dopadne.
Zdraví soused Petr, přikládám mail, kdyby něco